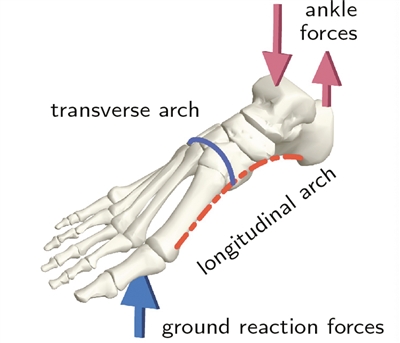
足部骨骼的足弓和典型承重方式的示意图。图片来源:《自然》
根据英国《自然》杂志26日在线发表的一项生物力学研究,美、日、英等国联合团队首次揭开人类双足演化形成特有的足弓使人类得以行走和奔跑的关键机制,这一发现加深了对人类双足演化的认识,将直接有助于改进机械足设计,进而为“物理灵活性”机器人铺平道路。
在实现优雅自然地行走这方面,机械足和机器人的表现一直不尽如人意,步态运动的协调性和机械足的灵巧度,也一直是业界难题。但这对人类来说却轻而易举,人类演化形成了坚硬足弓,对于有效的直立行走至关重要,不过奇怪的是,黑猩猩、大猩猩和猕猴等其他灵长类动物的脚则相对灵活、扁平。生物力学研究人员一直争论的一个问题是:人类双足的构造,究竟如何令足部坚硬。大多数研究都集中在从脚后跟到脚掌的内侧纵弓(MLA),而未考虑足横弓(TTA)的作用。
为了研究TTA是否会让双足坚硬,研究团队对人类双足进行了弯曲测试。结果表明,足部硬度40%以上源自TTA。从中间折一张纸,会使其纵向变硬,TTA对足部的作用与之类似。
研究人员还研究了多种灵长类动物的TTA的演化,包括已灭绝的古人类,进而发现:只有人属才充分演化形成了MLA和TTA。
这些发现表明,这两个相邻足弓共同作用,使足部纵向产生了硬度。此外,人类足部经过了多个阶段的演化,才得以让人类高效地行走和奔跑。
澳大利亚昆士兰大学研究人员格兰·里奇特沃克和卢克·凯利在论文随附的新闻与观点文章中表示,这一机制的阐明,未来将可以直接用于机械足、仿人脚的假肢以及有腿机器人的设计。(记者张梦然)